红绿灯检测及实现示例
1. 原理
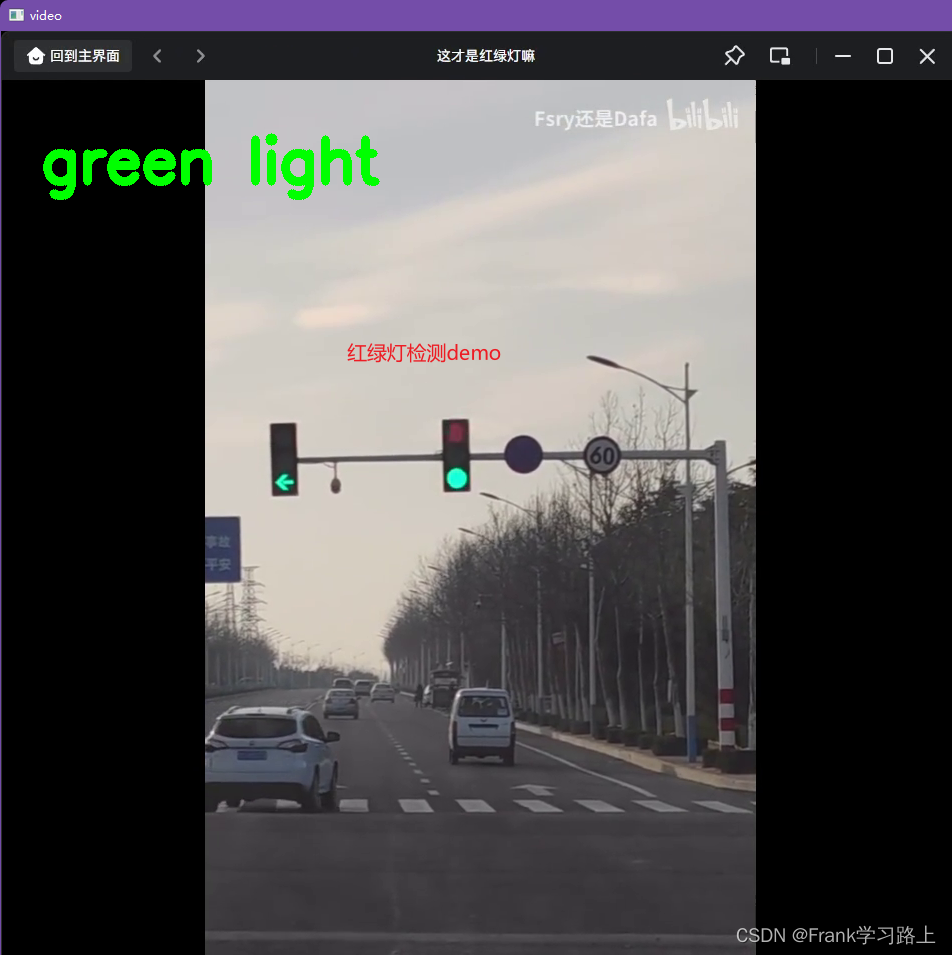
OpenCV好强,能够提取红绿灯的轮廓,并根据颜色空间判断红绿,不依赖深度学习算法也能做到可用的效果/demo。
红绿灯检测的基本步骤如下:
- 轮廓检测、计数
- red、green和light_out三种状态
- 提取颜色空间,红和绿
- 膨胀和腐蚀,去除噪点
- 判断3种状态
2. 代码实现
基于网络上的代码做复现的时候,遇到了opencv不同版本所出现的标识符未声明问题,我这里是基于opencv4.5.4实现的,4.x的应该都可以运行。
20230617-ubuntu(opencv3)测试通过。
创建trafficlight.h头文件,将一些引用和全局变量放进来:
#pragma once
#include "opencv2/opencv.hpp"
#include "opencv2/imgproc.hpp"
#include <opencv2/imgproc/types_c.h> //opencv3-4
#include <opencv2/imgproc/imgproc_c.h> //出现很多未声明标识符的问题
//#include <windows.h>
#include <iostream>
using namespace std;
using namespace cv;
// 函数声明
int processImgR(Mat);
int processImgG(Mat);
bool isIntersected(Rect, Rect);
void detect(Mat& frame);
// 全局变量
bool isFirstDetectedR = true;
bool isFirstDetectedG = true;
Rect* lastTrackBoxR;
Rect* lastTrackBoxG;
int lastTrackNumR;
int lastTrackNumG;
然后创建main.cpp,将主函数和功能函数加进来:
//下一步:如何调整视频检测框,防止误检
#include "trafficlight.h"
/*
1.轮廓检测、计数
2.red、green和light_out三种状态
3.提取颜色空间,红和绿
4.膨胀和腐蚀,去除噪点
5.判断3种状态
*/
//主函数
int main()
{
int redCount = 0;
int greenCount = 0;
Mat frame;
Mat img;
Mat imgYCrCb;
Mat imgGreen;
Mat imgRed;
// 亮度参数
double a = 0.3;
double b = (1 - a) * 125;
VideoCapture capture("traffic.mkv");//导入视频的路径/摄像头 0
if (!capture.isOpened())
{
cout << "Start device failed!n" << endl;//启动设备失败!
return -1;
}
// 帧处理
while (1)
{
capture >> frame;
//调整亮度
frame.convertTo(img, img.type(), a, b);
//转换为YCrCb颜色空间
cvtColor(img, imgYCrCb, CV_BGR2YCrCb);
imgRed.create(imgYCrCb.rows, imgYCrCb.cols, CV_8UC1);
imgGreen.create(imgYCrCb.rows, imgYCrCb.cols, CV_8UC1);
//分解YCrCb的三个成分
vector<Mat> planes;
split(imgYCrCb, planes);
// 遍历以根据Cr分量拆分红色和绿色
MatIterator_<uchar> it_Cr = planes[1].begin<uchar>(),
it_Cr_end = planes[1].end<uchar>();
MatIterator_<uchar> it_Red = imgRed.begin<uchar>();
MatIterator_<uchar> it_Green = imgGreen.begin<uchar>();
for (; it_Cr != it_Cr_end; ++it_Cr, ++it_Red, ++it_Green)
{
// RED, 145<Cr<470 红色
if (*it_Cr > 145 && *it_Cr < 470)
*it_Red = 255;
else
*it_Red = 0;
// GREEN 95<Cr<110 绿色
if (*it_Cr > 95 && *it_Cr < 110)
*it_Green = 255;
else
*it_Green = 0;
}
//膨胀和腐蚀
dilate(imgRed, imgRed, Mat(15, 15, CV_8UC1), Point(-1, -1));
erode(imgRed, imgRed, Mat(1, 1, CV_8UC1), Point(-1, -1));
dilate(imgGreen, imgGreen, Mat(15, 15, CV_8UC1), Point(-1, -1));
erode(imgGreen, imgGreen, Mat(1, 1, CV_8UC1), Point(-1, -1));
redCount = processImgR(imgRed);
greenCount = processImgG(imgGreen);
cout << "red:" << redCount << "; " << "green:" << greenCount << endl;
//条件判断
if (redCount == 0 && greenCount == 0)
{
cv::putText(frame, "lights out", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(255, 255, 255), 8, 8, 0);
}
else if (redCount > greenCount)
{
cv::putText(frame, "red light", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 0, 255), 8, 8, 0);
}
else {
cv::putText(frame, "green light", Point(40, 150), cv::FONT_HERSHEY_SIMPLEX, 2, cv::Scalar(0, 255, 0), 8, 8, 0);
}
imshow("video", frame);
//imshow("Red", imgRed);
//imshow("Green", imgGreen);
// Handle with the keyboard input
if (waitKey(20) == 'q')
break;
}
return 0;
}
//轮廓处理函数:红
int processImgR(Mat src)
{
Mat tmp;
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
vector<Point> hull;
CvPoint2D32f tempNode;
CvMemStorage* storage = cvCreateMemStorage();
CvSeq* pointSeq = cvCreateSeq(CV_32FC2, sizeof(CvSeq), sizeof(CvPoint2D32f), storage);
Rect* trackBox;
Rect* result;
int resultNum = 0;
int area = 0;
src.copyTo(tmp);
//提取轮廓
findContours(tmp, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE);
if (contours.size() > 0)
{
trackBox = new Rect[contours.size()];
result = new Rect[contours.size()];
//确定要跟踪的区域
for (int i = 0; i < contours.size(); i++)
{
cvClearSeq(pointSeq);
// 获取凸包的点集
convexHull(Mat(contours[i]), hull, true);
int hullcount = (int)hull.size();
// 凸包的保存点
for (int j = 0; j < hullcount - 1; j++)
{
tempNode.x = hull[j].x;
tempNode.y = hull[j].y;
cvSeqPush(pointSeq, &tempNode);
}
trackBox[i] = cvBoundingRect(pointSeq);
}
if (isFirstDetectedR)
{
lastTrackBoxR = new Rect[contours.size()];
for (int i = 0; i < contours.size(); i++)
lastTrackBoxR[i] = trackBox[i];
lastTrackNumR = contours.size();
isFirstDetectedR = false;
}
else
{
for (int i = 0; i < contours.size(); i++)
{
for (int j = 0; j < lastTrackNumR; j++)
{
if (isIntersected(trackBox[i], lastTrackBoxR[j]))
{
result[resultNum] = trackBox[i];
break;
}
}
resultNum++;
}
delete[] lastTrackBoxR;
lastTrackBoxR = new Rect[contours.size()];
for (int i = 0; i < contours.size(); i++)
{
lastTrackBoxR[i] = trackBox[i];
}
lastTrackNumR = contours.size();
}
delete[] trackBox;
}
else
{
isFirstDetectedR = true;
result = NULL;
}
cvReleaseMemStorage(&storage);
if (result != NULL)
{
for (int i = 0; i < resultNum; i++)
{
area += result[i].area();
}
}
delete[] result;
return area;
}
//轮廓处理函数:绿
int processImgG(Mat src)
{
Mat tmp;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
vector< Point > hull;
CvPoint2D32f tempNode;
CvMemStorage* storage = cvCreateMemStorage();
CvSeq* pointSeq = cvCreateSeq(CV_32FC2, sizeof(CvSeq), sizeof(CvPoint2D32f), storage);
Rect* trackBox;
Rect* result;
int resultNum = 0;
int area = 0;
src.copyTo(tmp);
//提取轮廓
findContours(tmp, contours, hierarchy, CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE);
if (contours.size() > 0)
{
trackBox = new Rect[contours.size()];
result = new Rect[contours.size()];
// 确定要跟踪的区域
for (int i = 0; i < contours.size(); i++)
{
cvClearSeq(pointSeq);
// 获取凸包的点集
convexHull(Mat(contours[i]), hull, true);
int hullcount = (int)hull.size();
// 保存凸包的点
for (int j = 0; j < hullcount - 1; j++)
{
tempNode.x = hull[j].x;
tempNode.y = hull[j].y;
cvSeqPush(pointSeq, &tempNode);
}
trackBox[i] = cvBoundingRect(pointSeq);
}
if (isFirstDetectedG)
{
lastTrackBoxG = new Rect[contours.size()];
for (int i = 0; i < contours.size(); i++)
lastTrackBoxG[i] = trackBox[i];
lastTrackNumG = contours.size();
isFirstDetectedG = false;
}
else
{
for (int i = 0; i < contours.size(); i++)
{
for (int j = 0; j < lastTrackNumG; j++)
{
if (isIntersected(trackBox[i], lastTrackBoxG[j]))
{
result[resultNum] = trackBox[i];
break;
}
}
resultNum++;
}
delete[] lastTrackBoxG;
lastTrackBoxG = new Rect[contours.size()];
for (int i = 0; i < contours.size(); i++)
{
lastTrackBoxG[i] = trackBox[i];
}
lastTrackNumG = contours.size();
}
delete[] trackBox;
}
else
{
isFirstDetectedG = true;
result = NULL;
}
cvReleaseMemStorage(&storage);
if (result != NULL)
{
for (int i = 0; i < resultNum; i++)
{
area += result[i].area();
}
}
delete[] result;
return area;
}
//确定两个矩形区域是否相交
bool isIntersected(Rect r1, Rect r2)
{
int minX = max(r1.x, r2.x);
int minY = max(r1.y, r2.y);
int maxX = min(r1.x + r1.width, r2.x + r2.width);
int maxY = min(r1.y + r1.height, r2.y + r2.height);
//判断是否相交
if (minX < maxX && minY < maxY)
return true;
else
return false;
}
运行结果如下(b站视频):
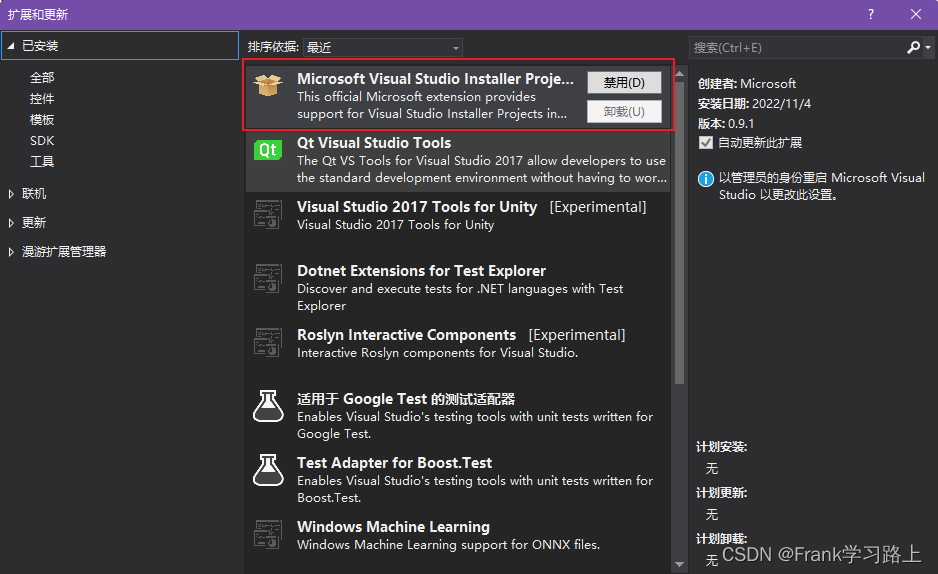
3. 打包程序为exe
首先在VS的扩展和更新中安装Installer的扩展:
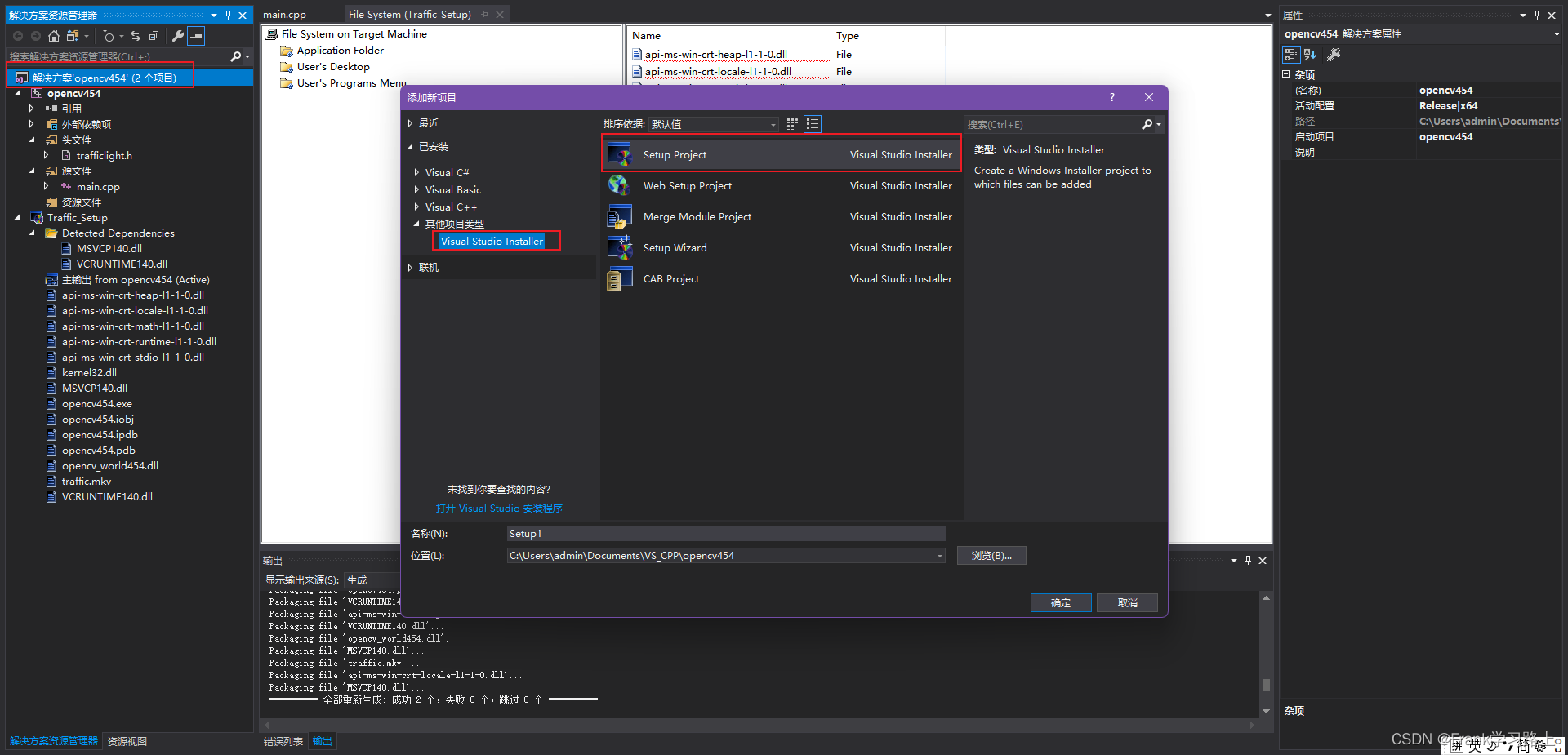
然后在解决方案下新建setup工程:
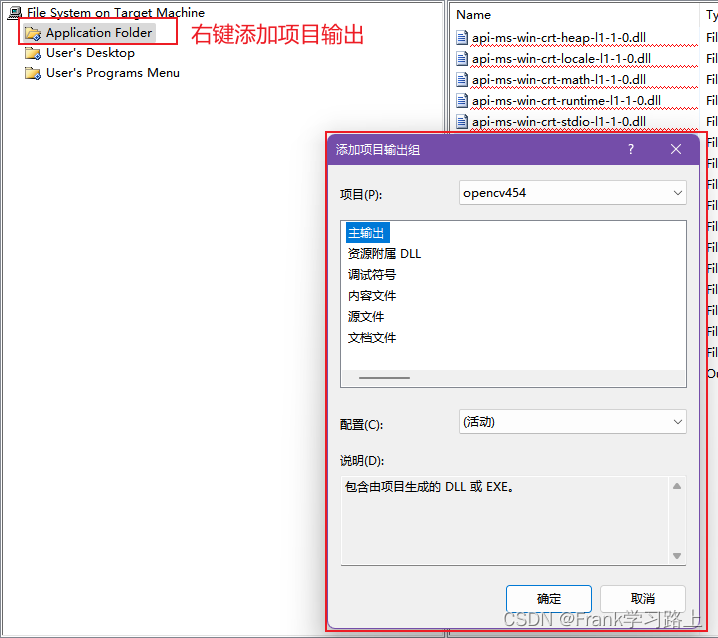
添加项目输出:
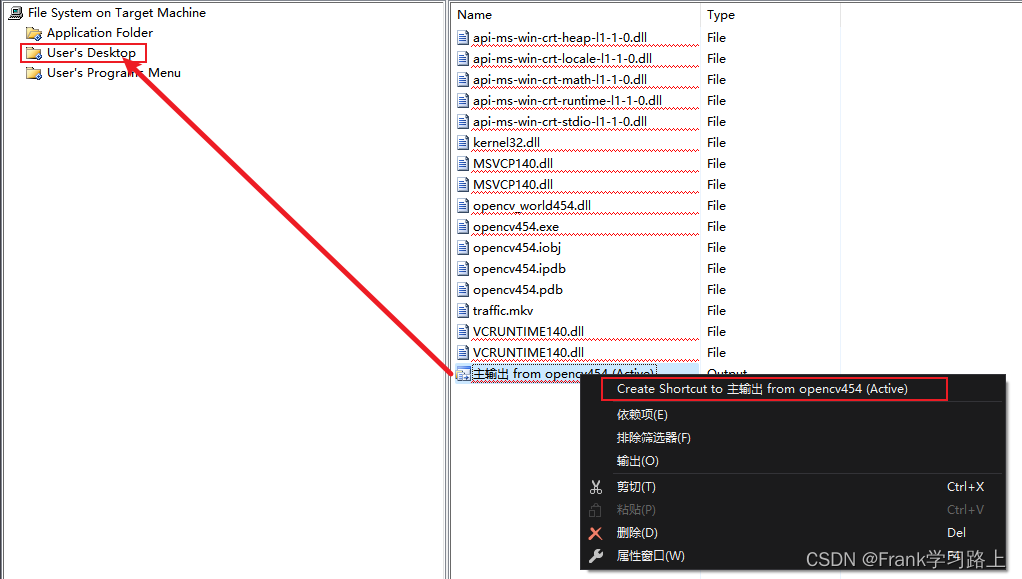
在主输出这里创建快捷方式,然后移动到User’s Desktop文件夹下:
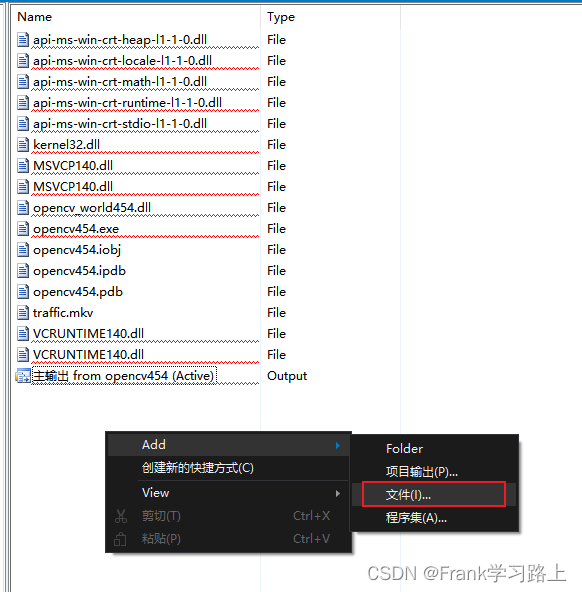
然后添加工程所需文件,把工程所需的数据文件和依赖库都添加进来:
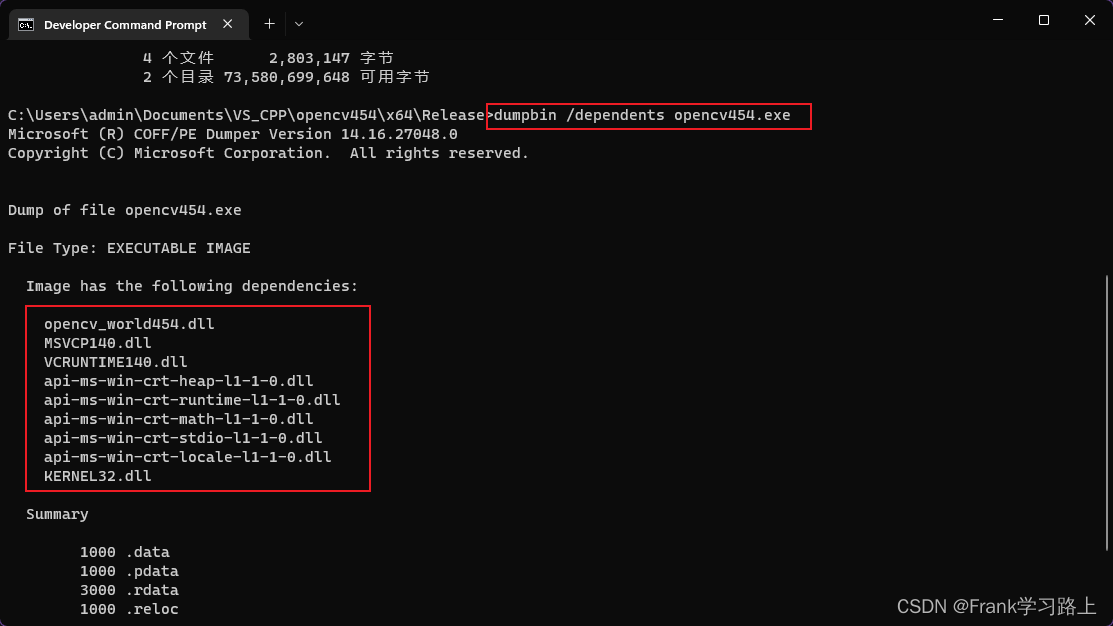
找依赖库的方式可以用这个命令,然后搜索并添加进来:
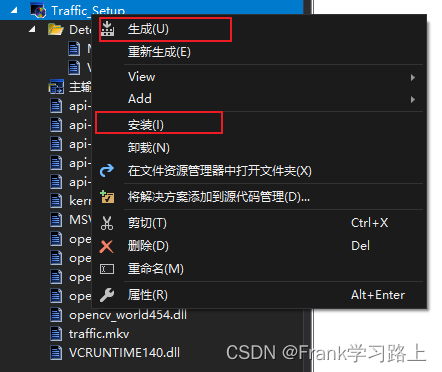
最后,点击生成,生成完成后,就可以安装了:
安装文件如下:

这样打包出来的安装程序就可以正常运行了。

以上。