DDS环境配置与使用示例
文章目录
1. FastDDS介绍
官方地址:https://www.eprosima.com/index.php/company-all/news/146-fast-rtps-is-now-fast-dds
API地址:https://fast-dds.docs.eprosima.com/en/latest/
FastDDS的前身是Fast-RTPS,实现了许多 DDS 规范。它是一种高性能的实时发布订阅框架。
FastDDS(Fast Data Distribution Service)是一种高性能、可扩展的数据分发服务,它实现了 OMG DDS(Object Management Group Data Distribution Service)标准。它是一个开源项目,旨在提供实时数据通信和消息传递的解决方案。
FastDDS 的主要特点和功能包括:
1.高性能:Fast DDS 使用基于发布-订阅模式的数据分发机制,支持快速、可靠的数据交换。它的设计目标是提供低延迟和高吞吐量的数据传输,以满足实时性要求高的应用场景。
2.可扩展性:Fast DDS 具有良好的可扩展性,可以适应不同规模和复杂度的系统。它支持多种通信模式和拓扑结构,并提供灵活的配置选项,以满足各种应用需求。
3.安全性:Fast DDS 提供了可靠的数据传输和身份验证机制,以确保数据的机密性和完整性。它支持加密和访问控制,保护敏感数据不受未授权方访问。
4.多语言支持:Fast DDS 支持多种编程语言,包括 C++、Java、Python 等,使得开发人员可以在不同的编程环境中使用 Fast DDS 进行开发。
5.高度可定制:Fast DDS 提供了丰富的配置选项和可扩展的插件机制,使用户能够根据具体需求进行自定义扩展和功能增强。
FastDDS 在实时数据通信领域具有广泛的应用,特别适用于分布式系统、实时控制和监控系统、机器人技术、物联网等领域。它为开发人员提供了一个可靠、高性能的数据分发平台,简化了实时数据交换的开发和集成过程。
2. 环境安装
FastDDS有bin、source、docker image三种安装方式。
这里采用bin安装,版本2.8.1。
下载地址:https://www.eprosima.com/index.php/component/ars/repository/eprosima-fast-dds/eprosima-fast-dds-2-8-1
安装包里,install.sh会自动安装各种依赖,然后进入src目录下,分别构建以下库:
- foonathan_memory_vendor,一个 STL 兼容的 C++ 内存分配器 库。
- fastcdr,一个根据 CDR 标准进行数据序列化的 C++ 库。
- fastrtps,eProsima Fast DDS库的核心库。
- fastddsgen,一个使用 IDL 文件中定义的数据类型生成源代码的 Java 应用程序。

执行install.h需要cmake 3.11以上的版本,如果版本低的话需要先升级cmake:http://t.csdn.cn/LezV9
# 下载cmake
wget https://cmake.org/files/v3.22/cmake-3.22.1.tar.gz
sudo tar -xvzf cmake-3.22.1.tar.gz -C /usr/share
cd /usr/share/cmake-3.22.1
# 安装cmake
sudo chmod 777 ./configure
sudo ./configure
sudo make
sudo make install
sudo update-alternatives --install /usr/bin/cmake cmake /usr/local/bin/cmake 1 --force
cmake --version
安装fastdds:
sudo ./install.sh
# 安装了:git、build-essential、cmake、libssl-dev、libasio-dev、libtinyxml2-dev、openjdk-8-jre-headless、foonathan_memory_vendor、fastcdr、fastrtps(Fast DDS)、fastddsgen。
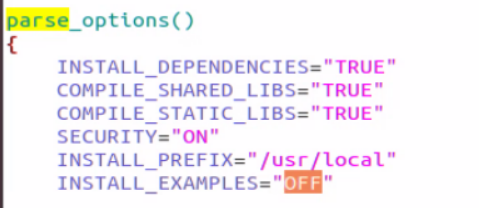
# 如果要测试FastDDS中的examples,需要在install.sh脚本脚本中打开该选项,默认为OFF。
安装包也提供了./uninstall.sh脚本,可随时卸载。
参考:https://www.jianshu.com/p/b9eb5dd9559f
3. 应用示例
官方示例
# 下载示例
git clone https://ghproxy.com/https://github.com/wanghuohuo0716/fastdds_helloworld.git
cd fastdds_helloworld
mkdir -p include/idl_generate/
cd idl/
fastddsgen -d ../include/idl_generate/ HelloWorld.idl # -d选项指示生成的头文件保存目录
# 根据IDL文件生成接口文件后,同一个终端内接着编译FastDDS程序。
cd ..
mkdir build && cd build
cmake ..
make
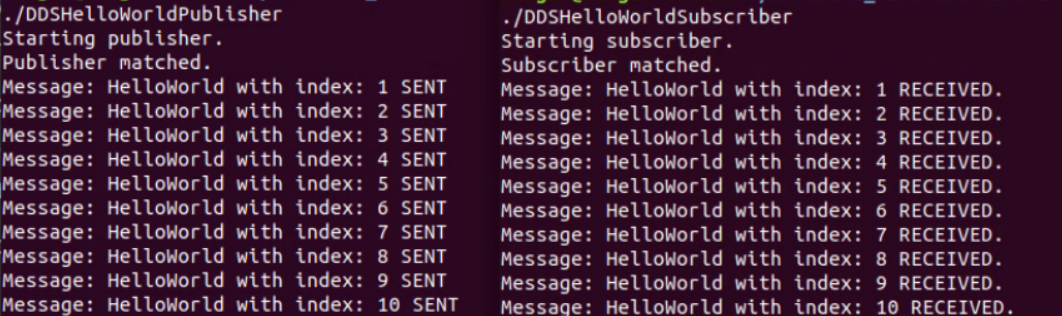
运行Publisher和Subscriber节点:
cd build/
./DDSHelloWorldPublisher
./DDSHelloWorldSubscriber
创建发布和订阅示例
mkdir ddstest
touch HelloWorld.idl
touch HelloWorldPublisher.cpp
touch HelloWorldSubscriber.cpp
touch CMakeLists.txt
HelloWorld.idl
module HelloWorldModule {
struct HelloWorld
{
unsigned long index;
string message;
};
};
HelloWorldPublisher.cpp
/**
* @file HelloWorldPublisher.cpp
*
*/
#include "./build/HelloWorld.h"
#include "./build/HelloWorldPubSubTypes.h"
#include <fastdds/dds/domain/DomainParticipantFactory.hpp>
#include <fastdds/dds/domain/DomainParticipant.hpp>
#include <fastdds/dds/topic/TypeSupport.hpp>
#include <fastdds/dds/publisher/Publisher.hpp>
#include <fastdds/dds/publisher/DataWriter.hpp>
#include <fastdds/dds/publisher/DataWriterListener.hpp>
using namespace eprosima::fastdds::dds;
class HelloWorldPublisher
{
private:
HelloWorld hello_;
DomainParticipant *participant_;
Publisher *publisher_;
Topic *topic_;
DataWriter *writer_;
TypeSupport type_;
class PubListener : public DataWriterListener
{
public:
PubListener()
: matched_(0)
{
}
~PubListener() override
{
}
void on_publication_matched(
DataWriter *,
const PublicationMatchedStatus &info) override
{
if (info.current_count_change == 1)
{
matched_ = info.total_count;
std::cout << "Publisher matched." << std::endl;
}
else if (info.current_count_change == -1)
{
matched_ = info.total_count;
std::cout << "Publisher unmatched." << std::endl;
}
else
{
std::cout << info.current_count_change << " is not a valid value for PublicationMatchedStatus current count change." << std::endl;
}
}
std::atomic_int matched_;
} listener_;
public:
HelloWorldPublisher()
: participant_(nullptr), publisher_(nullptr), topic_(nullptr), writer_(nullptr), type_(new HelloWorldPubSubType())
{
}
virtual ~HelloWorldPublisher()
{
if (writer_ != nullptr)
{
publisher_->delete_datawriter(writer_);
}
if (publisher_ != nullptr)
{
participant_->delete_publisher(publisher_);
}
if (topic_ != nullptr)
{
participant_->delete_topic(topic_);
}
DomainParticipantFactory::get_instance()->delete_participant(participant_);
}
// Initialize the publisher
bool init()
{
hello_.index(0);
hello_.message("HelloWorld, this is FastDDS."); // define message
DomainParticipantQos participantQos;
participantQos.name("Participant_publisher");
participant_ = DomainParticipantFactory::get_instance()->create_participant(0, participantQos);
if (participant_ == nullptr)
{
return false;
}
// Register the Type
type_.register_type(participant_);
// Create the publications Topic
topic_ = participant_->create_topic("HelloWorldTopic", "HelloWorld", TOPIC_QOS_DEFAULT);
if (topic_ == nullptr)
{
return false;
}
// Create the Publisher
publisher_ = participant_->create_publisher(PUBLISHER_QOS_DEFAULT, nullptr);
if (publisher_ == nullptr)
{
return false;
}
// Create the DataWriter
writer_ = publisher_->create_datawriter(topic_, DATAWRITER_QOS_DEFAULT, &listener_);
if (writer_ == nullptr)
{
return false;
}
return true;
}
// Send a publication
bool publish()
{
if (listener_.matched_ > 0)
{
hello_.index(hello_.index() + 1);
writer_->write(&hello_);
return true;
}
return false;
}
// Run the Publisher
void run(uint32_t samples)
{
uint32_t samples_sent = 0;
while (samples_sent < samples)
{
if (publish())
{
samples_sent++;
std::cout << "Message: " << hello_.message() << " with index: " << hello_.index() << " SENT" << std::endl;
}
std::this_thread::sleep_for(std::chrono::milliseconds(1000));
}
}
};
int main(int argc, char **argv)
{
std::cout << "Starting publisher." << std::endl;
int samples = 10; // pub count
HelloWorldPublisher *mypub = new HelloWorldPublisher();
if (mypub->init())
{
mypub->run(static_cast<uint32_t>(samples));
}
delete mypub;
return 0;
}
HelloWorldSubscriber.cpp
/**
* @file HelloWorldSubscriber.cpp
*
*/
#include "./build/HelloWorld.h"
#include "./build/HelloWorldPubSubTypes.h"
#include <fastdds/dds/domain/DomainParticipantFactory.hpp>
#include <fastdds/dds/domain/DomainParticipant.hpp>
#include <fastdds/dds/topic/TypeSupport.hpp>
#include <fastdds/dds/subscriber/Subscriber.hpp>
#include <fastdds/dds/subscriber/DataReader.hpp>
#include <fastdds/dds/subscriber/DataReaderListener.hpp>
#include <fastdds/dds/subscriber/qos/DataReaderQos.hpp>
#include <fastdds/dds/subscriber/SampleInfo.hpp>
using namespace eprosima::fastdds::dds;
class HelloWorldSubscriber
{
private:
DomainParticipant *participant_;
Subscriber *subscriber_;
DataReader *reader_;
Topic *topic_;
TypeSupport type_;
class SubListener : public DataReaderListener
{
public:
SubListener()
: samples_(0)
{
}
~SubListener() override
{
}
void on_subscription_matched(
DataReader *,
const SubscriptionMatchedStatus &info) override
{
if (info.current_count_change == 1)
{
std::cout << "Subscriber matched." << std::endl;
}
else if (info.current_count_change == -1)
{
std::cout << "Subscriber unmatched." << std::endl;
}
else
{
std::cout << info.current_count_change
<< " is not a valid value for SubscriptionMatchedStatus current count change" << std::endl;
}
}
void on_data_available(
DataReader *reader) override
{
SampleInfo info;
if (reader->take_next_sample(&hello_, &info) == ReturnCode_t::RETCODE_OK)
{
if (info.valid_data)
{
samples_++;
std::cout << "Message: " << hello_.message() << " with index: " << hello_.index()
<< " RECEIVED." << std::endl;
}
}
}
HelloWorld hello_;
std::atomic_int samples_;
} listener_;
public:
HelloWorldSubscriber()
: participant_(nullptr), subscriber_(nullptr), topic_(nullptr), reader_(nullptr), type_(new HelloWorldPubSubType())
{
}
virtual ~HelloWorldSubscriber()
{
if (reader_ != nullptr)
{
subscriber_->delete_datareader(reader_);
}
if (topic_ != nullptr)
{
participant_->delete_topic(topic_);
}
if (subscriber_ != nullptr)
{
participant_->delete_subscriber(subscriber_);
}
DomainParticipantFactory::get_instance()->delete_participant(participant_);
}
// Initialize the subscriber
bool init()
{
DomainParticipantQos participantQos;
participantQos.name("Participant_subscriber");
participant_ = DomainParticipantFactory::get_instance()->create_participant(0, participantQos);
if (participant_ == nullptr)
{
return false;
}
// Register the Type
type_.register_type(participant_);
// Create the subscriptions Topic
topic_ = participant_->create_topic("HelloWorldTopic", "HelloWorld", TOPIC_QOS_DEFAULT);
if (topic_ == nullptr)
{
return false;
}
// Create the Subscriber
subscriber_ = participant_->create_subscriber(SUBSCRIBER_QOS_DEFAULT, nullptr);
if (subscriber_ == nullptr)
{
return false;
}
// Create the DataReader
reader_ = subscriber_->create_datareader(topic_, DATAREADER_QOS_DEFAULT, &listener_);
if (reader_ == nullptr)
{
return false;
}
return true;
}
// Run the Subscriber
void run(uint32_t samples)
{
while (listener_.samples_ < samples)
{
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
}
};
int main(int argc, char **argv)
{
std::cout << "Starting subscriber." << std::endl;
int samples = 10; // sub count
HelloWorldSubscriber *mysub = new HelloWorldSubscriber();
if (mysub->init())
{
/* instant sub */
while (1)
{
mysub->run(static_cast<uint32_t>(samples));
}
}
delete mysub;
return 0;
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(HelloWorldExample)
set(CMAKE_CXX_STANDARD 11)
find_package(fastcdr REQUIRED)
find_package(fastrtps REQUIRED)
# generate idl_gen
file(GLOB IDL_SOURCES "${CMAKE_CURRENT_SOURCE_DIR}/*.idl")
foreach(IDL_FILE ${IDL_SOURCES})
get_filename_component(IDL_BASE_NAME ${IDL_FILE} NAME_WE)
set(GENERATED_SOURCES "${CMAKE_CURRENT_BINARY_DIR}/${IDL_BASE_NAME}.cxx" "${CMAKE_CURRENT_BINARY_DIR}/${IDL_BASE_NAME}.h")
add_custom_command(
OUTPUT ${GENERATED_SOURCES}
COMMAND fastddsgen -d ./ ${IDL_FILE}
DEPENDS ${IDL_FILE}
WORKING_DIRECTORY ${CMAKE_CURRENT_BINARY_DIR}
COMMENT "Generating C++ files from ${IDL_FILE}"
)
list(APPEND GENERATED_CPP_SOURCES ${GENERATED_SOURCES})
endforeach()
include_directories(${CMAKE_CURRENT_BINARY_DIR})
# generate lib
file(GLOB DDS_HELLOWORLD_SOURCES_CXX "./build/*.cxx")
add_library(HelloWorld_IDL_lib ${DDS_HELLOWORLD_SOURCES_CXX})
add_executable(HelloWorldPublisher HelloWorldPublisher.cpp ${GENERATED_CPP_SOURCES})
target_link_libraries(HelloWorldPublisher HelloWorld_IDL_lib fastcdr fastrtps)
add_executable(HelloWorldSubscriber HelloWorldSubscriber.cpp ${GENERATED_CPP_SOURCES})
target_link_libraries(HelloWorldSubscriber HelloWorld_IDL_lib fastcdr fastrtps)
# 编译运行
mkdir build && cd build
cmake ..
make
./HelloWorldPublisher
./HelloWorldSubscriber

以上。
😏1. opendds项目介绍
项目Github地址:https://github.com/OpenDDS/OpenDDS
官网:https://opendds.org/
OpenDDS(Open Data Distribution Service)是一个开源的、高性能的实时数据分发和通信框架,符合OMG(Object Management Group)发布的Data Distribution Service(DDS)标准。它提供了分布式系统中实时通信和数据交换的基础设施,支持发布者-订阅者模型,使分布式应用程序能够可靠地交换数据。
以下是OpenDDS的一些主要特点和功能:
1.数据分发:OpenDDS提供了可靠的数据分发机制,可以在分布式系统中高效地传输数据。它支持灵活的QoS(Quality of Service)策略,可以根据应用程序的需求配置数据交换的可靠性、传输速率、延迟、带宽等参数。
2.发布者-订阅者模型:OpenDDS基于发布者-订阅者模型,发布者将数据发布到特定的主题(Topic),而订阅者通过订阅相应的主题来接收数据。这种模型使得多个应用程序能够以异步、解耦的方式进行实时数据交换。
3.多种数据类型支持:OpenDDS支持多种数据类型的交换,包括结构体、数组、枚举和序列等。它使用IDL(Interface Definition Language)来定义数据类型,并自动生成相应的代码和类型支持。
4.可扩展性:OpenDDS具有良好的可扩展性,可以处理大规模分布式系统中的复杂通信需求。它支持动态发现和自适应性,可以自动发现和适应系统中的节点和资源变化。
5.平台支持:OpenDDS可在多个平台上运行,包括Linux、Windows和macOS等。它提供了对不同操作系统和网络协议的支持,并且可以与其他编程语言(如C++、Java和Python)进行集成。
6.社区支持:OpenDDS是一个活跃的开源项目,拥有一个积极的社区,提供了广泛的文档、示例代码和讨论论坛,以帮助开发人员学习和使用OpenDDS。
OpenDDS是一个功能强大的实时数据分发和通信框架,适用于构建要求高性能、可靠性和实时性的分布式应用程序。它提供了丰富的功能和配置选项,可以根据应用程序的需求进行灵活的配置和定制。
😊2. 环境配置
下面进行环境配置:
sudo apt-get install build-essential libace-dev libssl-dev
# 下载对应版本
https://opendds.org/downloads.html
# configure会下载ACE+TAO网络包,如果访问github慢,可以在configure的878和886行添加镜像源https://mirror.ghproxy.com/
./configure
# 编译
make
😆3. 使用说明
官方示例:
source setenv.sh
cd DevGuideExamples/DCPS/Messenger
./run_test.pl

以上。